成天软件海量科研管理资讯平台提供:
3月11日,中国科学院深圳先进技术研究院医工所副研究员徐海峰团队在《美国化学学会—纳米》杂志发表最新成果。研究团队开发了一种用于靶向递药的磁驱软体机器人,该微型机器人能根据器官内不同地形的机械特点,运用与环境最安全的交互方式,进行效率与生物安全兼顾的生物货物转运和释放。
药物输送系统或手术器械必须克服目标小腔道内平坦区域、褶皱和狭窄通道等复杂的结构形貌。在输卵管等小腔道内进行细胞和药物等物体转运,对手术器械或软体机器人的精度提出了更高要求。
对此,科研人员提出一种在输卵管内进行靶向药物输送的新手段,利用磁驱微型软体机器人在行进中进行原位编程和运动模态的切换,以适应输卵管中复杂环境的变化,最终在穿过狭小空间后,进行可控的药物释放。
这一微型机器人通过在高速刚性运动和高适应性软驱动之间不断切换其运动模式,可在具有复杂内部结构和复杂表面形貌的输卵管中有效导航。单个毫米机器人可实现仿土虱滚动和翻转、仿精子旋转和仿蛇滑行等多个运动模态,分别用于通过不同的障碍物场景,包括平坦区域和高台阶、狭窄的通道和固液界面。
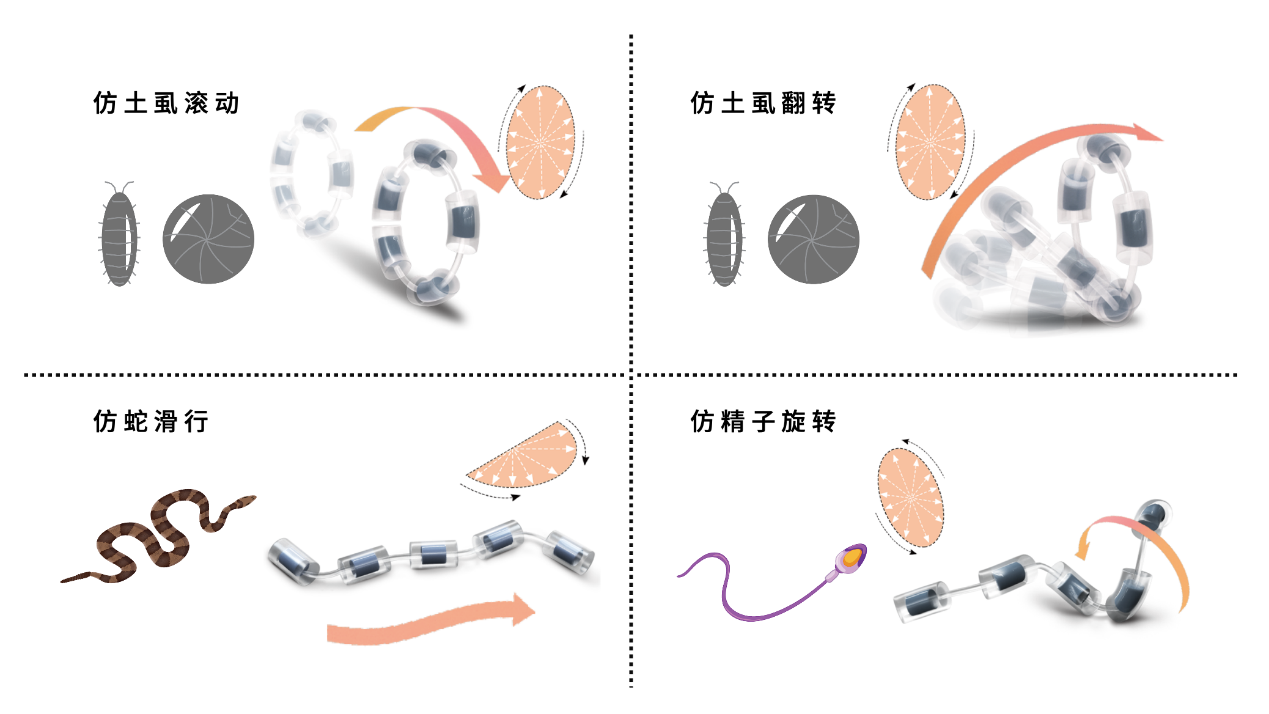
基于原位编程策略,单个磁驱软体机器人实现多个运动模态 科研团队供图
“磁驱软体机器人的滚动模态可实现高速运动,速度可达每秒23毫米。药物释放既能通过溶解缓慢释放,也可通过激光在14秒内快速释放。”论文共同第一作者、深圳先进院医工所副研究员刘源介绍,这为人体内难以进入的小腔道环境进行有针对性的医疗诊断应用带来新的方向,减少了微组织损伤和药物副作用。
研究团队还在离体猪输卵管中控制微型软体机器人执行自适应多模态运动和药物递送,离体输卵管提供了真实的生理环境,具有各种类型的屏障,包括平坦区域、皱纹、粘液层和狭窄通道。结果表明,在磁场下,微型机器人朝着目标区域前进,在100秒内运动了55毫米,在目标区域快速释放药物,展示了这一新型机器人对输卵管环境的适应性。
此外,研究团队还证明了微型软体机器人通过局部区域内生物货物释放以治疗如肿瘤、粘连、感染和炎症等女性上生殖道疾病的潜力。
“接下来,我们希望将其与正在研究的微纳机器人和现有的微创手术器械整合,以提高其在各种医疗场景中的多功能性,开发一种能跨尺度进行细胞、诊疗药物等生物样本体内靶向转运的机器人系统。”论文通讯作者徐海峰表示。
相关论文信息:https://pubs.acs.org/doi/abs/10.1021/acsnano.3c09753
成天软件《人事管理系统 》采用多层软件架构,统一身份认证,数据呈现,能够基于校园网/互联网为高校、医院、研究所人事管理提供先进、实用的信息化管理平台。 已积累百家高校案例,详情电话咨询15851303988。 《高校科研管理系统 》涵盖高校科研管理工作的所有环节,能够适应理工农医类、人文社科类以及综合性高校的管理需求,协助高校建立符合自身特殊需要的人事管理规范,为高校建设数字校园奠定坚实的技术基础与管理基础。
本文转载自:科学网。文章为作者独立观点,不代表成天立场,转载请联系原作者。
点击量:220
湖南师范大学高校人力资源系统
湖南师范大学,作为湖南省内历史悠久、声誉卓著的高等学府,始终将人才培养与师资队伍建设视为学校发展的基石。近年来,学校积极响应国家教育现代化战略,全面升级人力资源管理体系,构建了一套先进、智能的高校人力资源系统,旨在优化教职工管理流程,提升服务质量,激发人才潜力,为学校教育事业的高质量发展提供坚实的人力资源保障。
保山学院高校人力资源系统
保山学院高校人力资源系统,作为学校人事管理的数字化转型引擎,是一个集教职工招聘、人事档案管理、薪酬福利处理、培训与发展、绩效评估、职业规划于一体的综合性平台。该系统旨在优化人力资源管理流程,提升管理效率,强化教职工队伍建设,为保山学院的教育与科研事业发展提供坚实的人力资源保障。
中国科学院之江实验室诚邀优秀青年学者加盟
中国科学院之江实验室诚邀优秀青年学者加盟
中国科学院山西煤炭化学研究所高层次人才招聘公告
中国科学院山西煤炭化学研究所 人事管理,人事管理系统,人事系统,高校人事,人力资源管理,人力资源管理系统,大学人事管理,人事绩效考核
西电杭州研究院高层次人才招聘公告
西电杭州研究院 人事管理系统 招聘公告